 |
|
Public Member Functions | |
| EventMap * | GetMap () |
| BaseFloat | BestSplit () |
| void | DoSplit (int32 *next_leaf) |
| DecisionTreeSplitter (EventAnswerType leaf, const BuildTreeStatsType &stats, const Questions &q_opts) | |
| ~DecisionTreeSplitter () | |
Private Member Functions | |
| void | DoSplitInternal (int32 *next_leaf) |
| void | FindBestSplit () |
Private Attributes | |
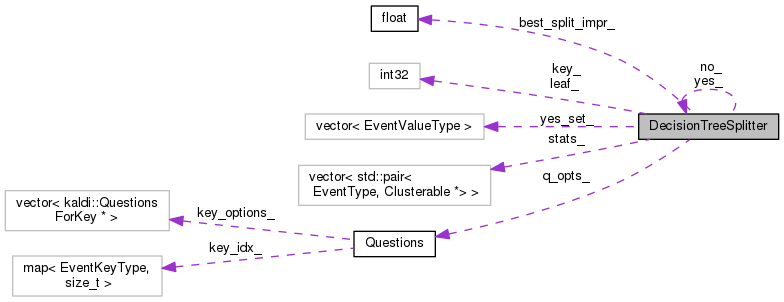
| const Questions & | q_opts_ |
| BaseFloat | best_split_impr_ |
| DecisionTreeSplitter * | yes_ |
| DecisionTreeSplitter * | no_ |
| EventAnswerType | leaf_ |
| BuildTreeStatsType | stats_ |
| EventKeyType | key_ |
| std::vector< EventValueType > | yes_set_ |
Definition at line 429 of file build-tree-utils.cc.
|
inline |
Definition at line 447 of file build-tree-utils.cc.
References DecisionTreeSplitter::FindBestSplit().
Referenced by DecisionTreeSplitter::DoSplitInternal(), and kaldi::SplitDecisionTree().
|
inline |
Definition at line 452 of file build-tree-utils.cc.
References DecisionTreeSplitter::no_, and DecisionTreeSplitter::yes_.
|
inline |
Definition at line 438 of file build-tree-utils.cc.
References DecisionTreeSplitter::best_split_impr_.
Referenced by DecisionTreeSplitter::DoSplit(), DecisionTreeSplitter::DoSplitInternal(), and kaldi::SplitDecisionTree().
|
inline |
Definition at line 439 of file build-tree-utils.cc.
References DecisionTreeSplitter::best_split_impr_, DecisionTreeSplitter::BestSplit(), DecisionTreeSplitter::DoSplitInternal(), DecisionTreeSplitter::no_, and DecisionTreeSplitter::yes_.
|
inlineprivate |
Definition at line 457 of file build-tree-utils.cc.
References kaldi::ApproxEqual(), DecisionTreeSplitter::best_split_impr_, DecisionTreeSplitter::BestSplit(), DecisionTreeSplitter::DecisionTreeSplitter(), Clusterable::Distance(), KALDI_ASSERT, KALDI_ERR, KALDI_WARN, DecisionTreeSplitter::key_, DecisionTreeSplitter::leaf_, EventMap::Lookup(), DecisionTreeSplitter::no_, DecisionTreeSplitter::q_opts_, DecisionTreeSplitter::stats_, kaldi::SumStats(), DecisionTreeSplitter::yes_, and DecisionTreeSplitter::yes_set_.
Referenced by DecisionTreeSplitter::DoSplit().
|
inlineprivate |
Definition at line 489 of file build-tree-utils.cc.
References DecisionTreeSplitter::best_split_impr_, kaldi::FindBestSplitForKey(), Questions::GetKeysWithQuestions(), Questions::HasQuestionsForKey(), rnnlm::i, KALDI_WARN, DecisionTreeSplitter::key_, DecisionTreeSplitter::q_opts_, DecisionTreeSplitter::stats_, and DecisionTreeSplitter::yes_set_.
Referenced by DecisionTreeSplitter::DecisionTreeSplitter().
|
inline |
Definition at line 431 of file build-tree-utils.cc.
References DecisionTreeSplitter::GetMap(), DecisionTreeSplitter::key_, DecisionTreeSplitter::leaf_, DecisionTreeSplitter::no_, DecisionTreeSplitter::yes_, and DecisionTreeSplitter::yes_set_.
Referenced by DecisionTreeSplitter::GetMap(), and kaldi::SplitDecisionTree().
|
private |
Definition at line 516 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::BestSplit(), DecisionTreeSplitter::DoSplit(), DecisionTreeSplitter::DoSplitInternal(), and DecisionTreeSplitter::FindBestSplit().
|
private |
Definition at line 527 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplitInternal(), DecisionTreeSplitter::FindBestSplit(), and DecisionTreeSplitter::GetMap().
|
private |
Definition at line 523 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplitInternal(), and DecisionTreeSplitter::GetMap().
|
private |
Definition at line 520 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplit(), DecisionTreeSplitter::DoSplitInternal(), DecisionTreeSplitter::GetMap(), and DecisionTreeSplitter::~DecisionTreeSplitter().
|
private |
Definition at line 515 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplitInternal(), and DecisionTreeSplitter::FindBestSplit().
|
private |
Definition at line 524 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplitInternal(), and DecisionTreeSplitter::FindBestSplit().
|
private |
Definition at line 519 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplit(), DecisionTreeSplitter::DoSplitInternal(), DecisionTreeSplitter::GetMap(), and DecisionTreeSplitter::~DecisionTreeSplitter().
|
private |
Definition at line 528 of file build-tree-utils.cc.
Referenced by DecisionTreeSplitter::DoSplitInternal(), DecisionTreeSplitter::FindBestSplit(), and DecisionTreeSplitter::GetMap().
 1.8.13
1.8.13