 |
|
Classes | |
| struct | point_info |
Public Types | |
| typedef int32 | LocalInt |
| typedef uint_smaller | ClustIndexInt |
Public Member Functions | |
| RefineClusterer (const std::vector< Clusterable *> &points, std::vector< Clusterable *> *clusters, std::vector< int32 > *assignments, RefineClustersOptions cfg) | |
| BaseFloat | Refine () |
Private Member Functions | |
| void | InitPoint (int32 point) |
| void | InitPoints () |
| void | Iterate () |
| void | MovePoint (int32 point, int32 new_index) |
| void | UpdateClust (int32 clust) |
| void | ProcessPoint (int32 point) |
| void | UpdateInfo (int32 point, int32 idx) |
| point_info & | GetInfo (int32 point, int32 idx) |
Private Attributes | |
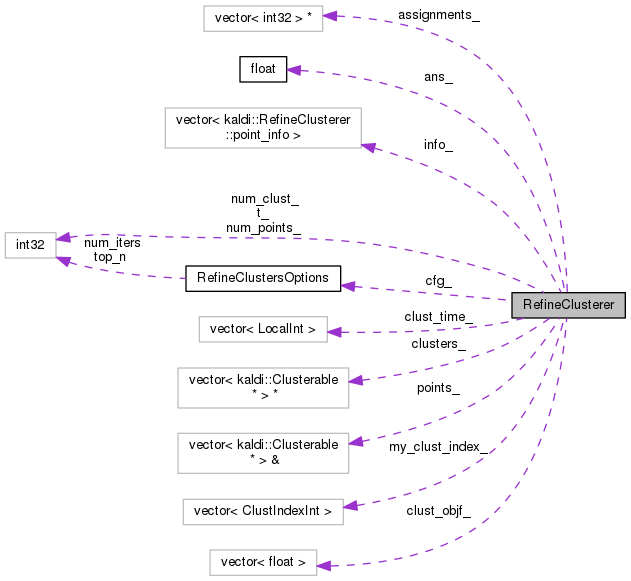
| const std::vector< Clusterable * > & | points_ |
| std::vector< Clusterable * > * | clusters_ |
| std::vector< int32 > * | assignments_ |
| std::vector< point_info > | info_ |
| std::vector< ClustIndexInt > | my_clust_index_ |
| std::vector< LocalInt > | clust_time_ |
| std::vector< BaseFloat > | clust_objf_ |
| BaseFloat | ans_ |
| int32 | num_clust_ |
| int32 | num_points_ |
| int32 | t_ |
| RefineClustersOptions | cfg_ |
Definition at line 686 of file cluster-utils.cc.
| typedef uint_smaller ClustIndexInt |
Definition at line 693 of file cluster-utils.cc.
Definition at line 692 of file cluster-utils.cc.
|
inline |
Definition at line 695 of file cluster-utils.cc.
References BottomUpClusterer::ans_, BottomUpClusterer::clusters_, rnnlm::i, KALDI_ASSERT, and BottomUpClusterer::points_.
|
inlineprivate |
Definition at line 868 of file cluster-utils.cc.
References rnnlm::i, KALDI_ASSERT, and KALDI_PARANOID_ASSERT.
|
inlineprivate |
Definition at line 728 of file cluster-utils.cc.
References Clusterable::Add(), RefineClusterer::point_info::clust, Clusterable::Copy(), RefineClusterer::point_info::objf, BottomUpClusterer::points_, and RefineClusterer::point_info::time.
|
inlineprivate |
Definition at line 772 of file cluster-utils.cc.
|
inlineprivate |
Definition at line 792 of file cluster-utils.cc.
References BottomUpClusterer::assignments_, RefineClusterer::point_info::clust, KALDI_ASSERT, and BottomUpClusterer::points_.
|
inlineprivate |
Definition at line 815 of file cluster-utils.cc.
References BottomUpClusterer::ans_, RefineClusterer::point_info::clust, KALDI_ASSERT, and RefineClusterer::point_info::objf.
|
inline |
Definition at line 721 of file cluster-utils.cc.
References BottomUpClusterer::ans_.
Referenced by kaldi::RefineClusters().
|
inlineprivate |
Definition at line 810 of file cluster-utils.cc.
References KALDI_ASSERT.
Definition at line 847 of file cluster-utils.cc.
References Clusterable::Add(), RefineClusterer::point_info::clust, Clusterable::Copy(), Clusterable::Objf(), RefineClusterer::point_info::objf, BottomUpClusterer::points_, Clusterable::Sub(), and RefineClusterer::point_info::time.
|
private |
Definition at line 886 of file cluster-utils.cc.
|
private |
Definition at line 877 of file cluster-utils.cc.
|
private |
Definition at line 891 of file cluster-utils.cc.
|
private |
Definition at line 884 of file cluster-utils.cc.
|
private |
Definition at line 883 of file cluster-utils.cc.
|
private |
Definition at line 876 of file cluster-utils.cc.
|
private |
Definition at line 879 of file cluster-utils.cc.
|
private |
Definition at line 880 of file cluster-utils.cc.
|
private |
Definition at line 888 of file cluster-utils.cc.
|
private |
Definition at line 889 of file cluster-utils.cc.
|
private |
Definition at line 875 of file cluster-utils.cc.
|
private |
Definition at line 890 of file cluster-utils.cc.
 1.8.13
1.8.13